A NASA recorreu ao Claude, o modelo de Inteligência Artificial da Anthropic, para planejar uma rota para o rover Perseverance em Marte. Apesar de operadores humanos terem feito algumas alterações, a experiência foi considerada um sucesso pelo administrador da NASA, Jared Isaacman.
A NASA usou, pela primeira vez, Inteligência Artificial para planejar uma rota para o rover Perseverance em Marte. As duas demonstrações, realizadas pelo Jet Propulsion Laboratory (JPL), da agência espacial norte-americana, foram concluídas sem nenhum problema.
Segundo a NASA, os testes utilizaram o modelo de Inteligência Artificial Claude, da Anthropic. Depois que as rotas foram traçadas, elas passaram por verificação de pesquisadores do JPL, para garantir que a integridade física do Perseverance não seria colocada em risco durante a experiência.
As duas demonstrações aconteceram nos dias 8 e 10 de dezembro. Ao todo, o Perseverance percorreu 457 metros. Como não houve qualquer incidente, o experimento foi considerado um sucesso.
A NASA aplicou com o Claude o mesmo procedimento que normalmente adota com operadores humanos. O modelo de IA teve acesso a imagens e dados captados pelo satélite Mars Reconnaissance Orbiter (MRO) e recebeu a tarefa de definir o trajeto, sempre priorizando a segurança do rover.
A NASA chegou a fazer alguns ajustes no percurso. Mesmo assim, depois que as rotas foram enviadas ao Perseverance, o rover completou o caminho de forma autônoma.
“Esta demonstração mostra o quanto as nossas capacidades avançaram e amplia a forma as formas como vamos explorar outros mundos”, declarou em comunicado o administrador da NASA, Jared Isaacman. “As tecnológicas autónomas como esta podem ajudar as missões a operarem de forma mais eficiente, adaptarem-se a terrenos desafiantes e aumentar o retorno científico à medida que a distância da Terra aumenta. É um exemplo forte de equipas a aplicarem nova tecnologia de forma cuidadosa e com responsabilidade em operações reais”.
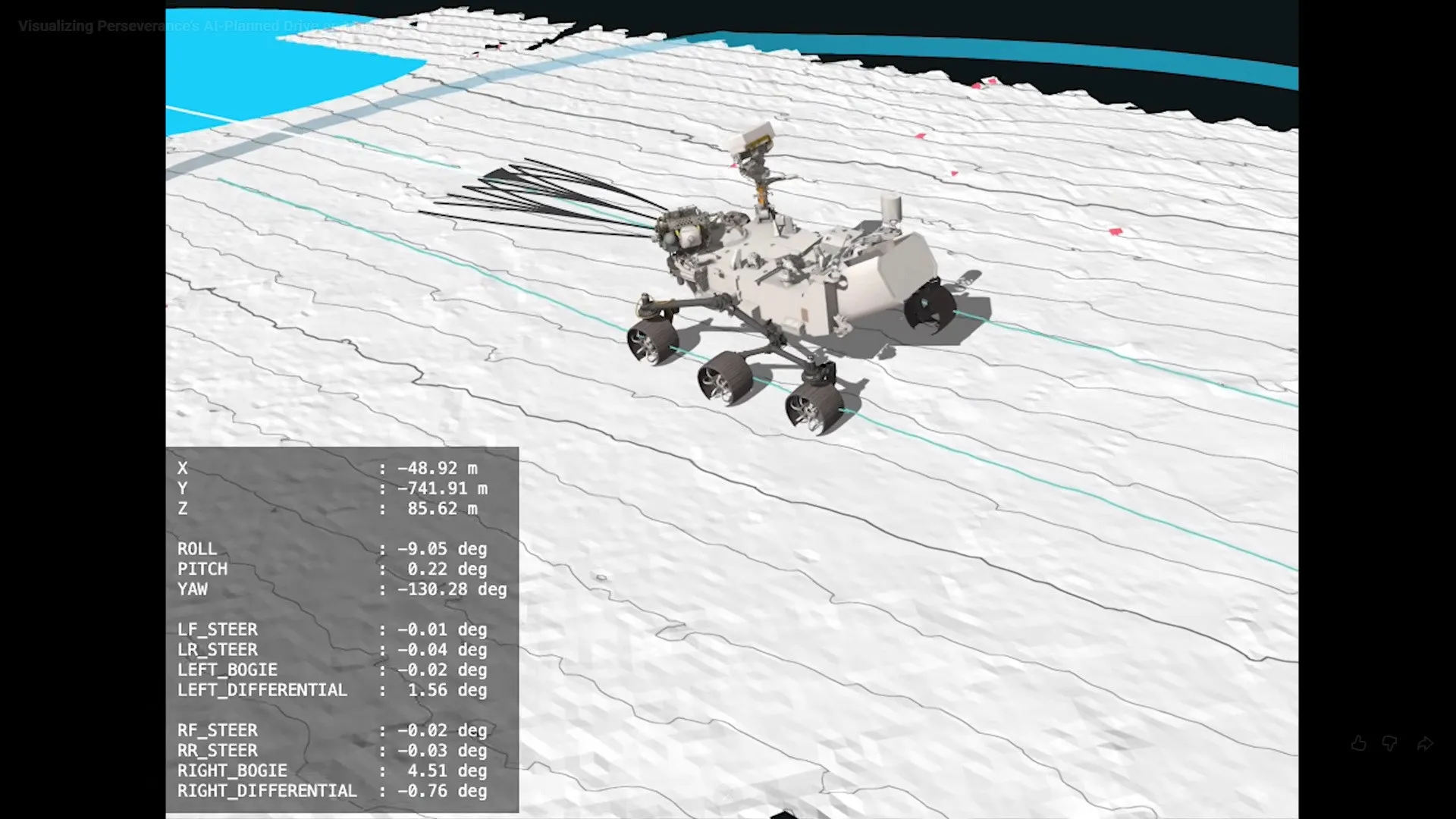
Para quem quiser ver como o trajeto foi realizado, o Jet Propulsion Lab publicou em seu canal no YouTube um vídeo do percurso feito em 10 de dezembro.
O vídeo pode ser encontrado acima.




